
The MicronBattery Modem provides a reliable data link for through-water communications where there are limitations on space and/or power, without the need for an external power source.
Suitable for use as a stand-alone data transfer system, part of an AUV control system, or self-powered Transponder/ Responder beacon for the MicronNav 200 USBL system.
The MicronBattery Modem is ideal for subsea data transfer applications where an external power supply may not be readily available. Utilising the internal battery power the Modem will operate in standby mode, where it’s always listening, for approximately 30 days and when transmitting with an update rate of 1 transmission every 2 seconds then the Modem will run for approximately 7 days.
When the Modem is connected to an external power source, the internal batteries act as a backup to ensure the Modem continues to operate in the event of loss of external power. The Modem provides robust spread spectrum low data-rate transmission from a compact and low cost unit with communication ranges out to 500m horizontally and 150m vertically.
The Modem can be configured for use as a data modem, transponder or responder by using the Tritech Genesis software, while the rotary selector on the Modem allows for selection of 1 of 16 transponder IDs.
Resources
Manuals, Datasheets, Software, etc.
Datasheet
MicronBattery ModemSoftware
Genesis v1.10.5Technical Notices
Calibration Frequency Guidance
Vehicle tracking using MicronNav 200

Boat tracking using MicronNav 200

Vehicle tracking using MicronNav 200

Battery Modem
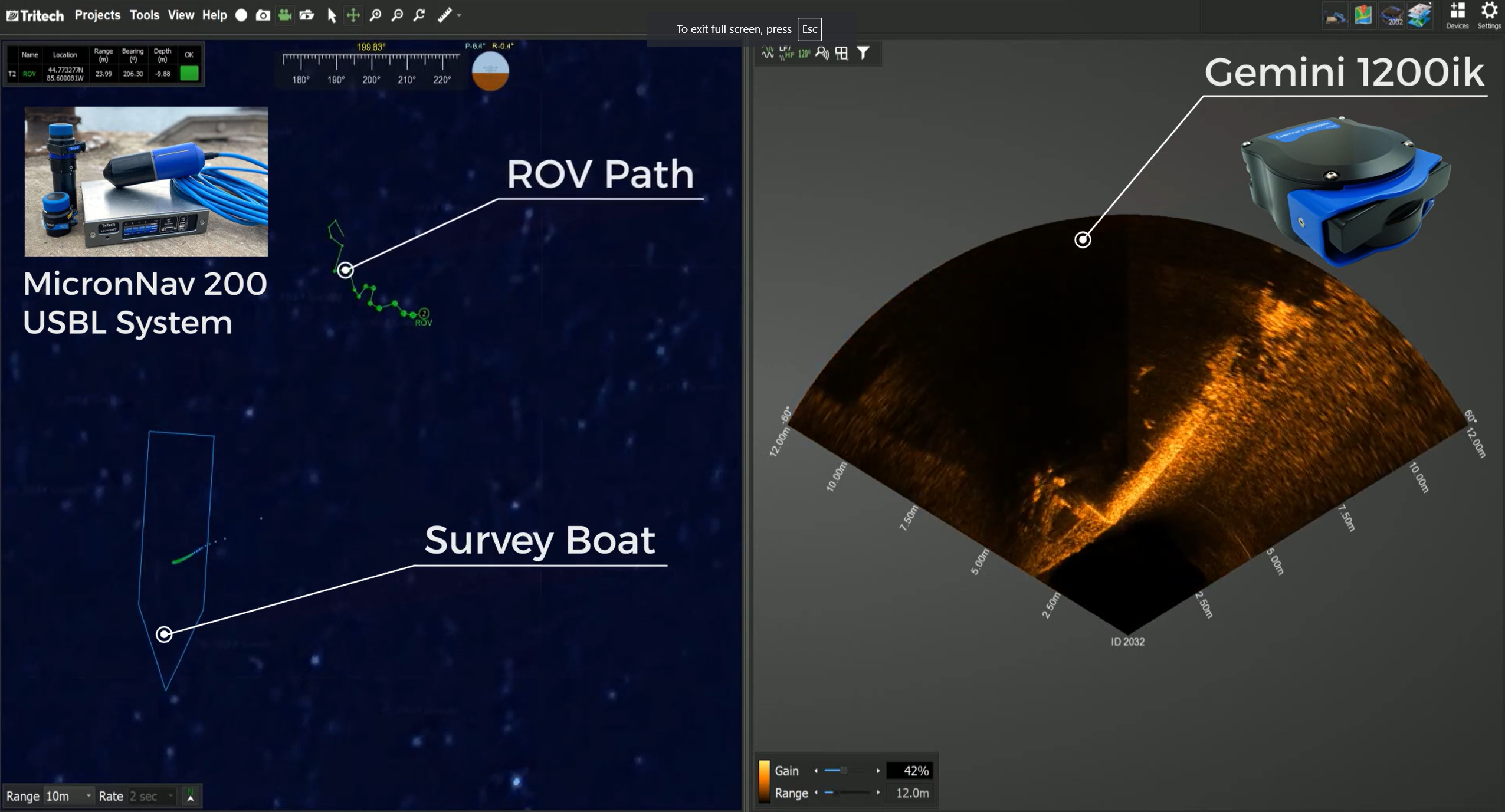
USBL System and Multibeam Sonar
1 Minute
FAQs
Where can I find the calibration frequency for Tritech products?
The calibration frequency guidance document can be found under the technical notices in the Resources page. To go directly to them click on the link "Technical Notices"
Alternatively, the document can be accessed here: Calibration Frequency Guidance
How does a USBL System Work?
How does a USBL system work?
The Tritech MicronNav 200 is a USBL positioning system. USBL stands for Ultra-Short Baseline, but knowing that alone doesn’t offer much insight into how the system works. This short article aims to explain a little more about the system and how to get the best out of it.
Radio frequency signals are heavily attenuated by water, and so radio-based positioning systems like GPS cannot be used underwater. The solution is to use acoustics. Sound, particularly at low frequencies (such as the 20 kHz to 28 kHz band where the MicronNav 200 system operates) can travel large distances through water.
What is an acoustic positioning system?
An acoustic positioning system comprises two main elements: the USBL head (sometimes called the dunker) near the surface, and one or more remote modems, also called transponders or beacons. The USBL head may be mounted to a vessel or simply deployed on a pole from somewhere like a jetty. The modem(s) may be mounted to ROVs, divers, or any other object whose position is to be tracked.
The system works by the USBL head transmitting an acoustic message to interrogate one of the modems; this message includes an address, so that only one modem will reply. When the addressed modem receives this message, it will respond with an acoustic signal, which is in turn received by the USBL head. The system may then move on to interrogating other modems, one at a time.
How does the system measure range?
The time delay between the USBL head transmitting and receiving a response is used to calculate the distance (slant range) between the USBL head and the modem. Sound travels in water at around 1500 m/s (it varies due to factors such as salinity, temperature and pressure), and so with knowledge of an accurate speed of sound, an accurate slant range can be calculated.
How does the system measure angles?
The slant range alone is only a one-dimensional (1D) position fix. To calculate a three-dimensional (3D) position, two additional pieces of information are needed: the horizontal and vertical angles between USBL head and the modem. A USBL system obtains this additional information by using an array of receiving hydrophones inside the USBL head; in the case of the MicronNav 200, four receiving hydrophones are used. The system measures the phase difference between the signals arriving at each of the hydrophones, and uses this to calculate the angle of arrival of the acoustic signal from the modem.
The distance between the receiving hydrophones is known as the Baseline, and in the case of a compact system like the MicronNav 200, the distance is commonly referred to as Ultra-Short. Alternative (e.g. Long Baseline) systems may spread receiving hydrophones along the length of a ship, or at multiple fixed locations, trading cost / practicality / complexity for improved angular accuracy.
How does geo-referencing work?
Having measured the slant range and horizontal / vertical angles, the system can now calculate a 3D position for the modem. At this point however, that calculated position is relative to the attitude, heading and position of the USBL head. To account for the attitude and heading of the USBL head, the MicronNav 200 USBL head conveniently includes an integrated magnetic compass and pitch & roll sensor. To account for the global position of the USBL head, the system accepts an external input from a GPS or similar positioning system.
With all of this in place, a USBL system can now calculate and display geo-referenced positions of multiple tracked modems on charts.
What practical difficulties may be encountered?
Like all acoustic systems, USBL positioning systems are affected by the underwater acoustic environment. Noise from wave motion, ships engines, depth sounders etc. can interfere with operation of the system. The MicronNav 200 uses spread spectrum (chirp) acoustic pulses for robust operation in noisy environments. The chirp pulses have a unique acoustic signature which can be isolated from background noise.
Multipath reflections can also present difficulties for USBL systems, since the reflected acoustic signal is a time-delayed copy of the direct-path signal. Sound reflects most strongly when it meets an object with a significantly different density to water: rock, steel and air (bubbles or the water surface) are good examples of this.
Where the reflecting surface is irregular, the reflections tend to be broken up and interfere destructively with each other so as not to present a problem. Where the reflecting surface is large and flat (such as a ship’s hull, a rock wall or the water surface on a calm day), then it acts as an acoustic mirror, presenting a near-perfect copy of the original signal. Correct mounting of both the USBL head and the modem is critical to reliable system performance. They must both be placed at least 1m away from large flat reflecting surfaces.
What additional features might be useful?
A USBL system may also include additional features such as:
- Modems with integral rechargeable batteries, for convenient deployment with divers, but also to act as a backup lost ROV locator in case the ROV tether is severed.
- Options to trigger the modem electrically rather than acoustically; this is known as responder mode (in contrast to the more usual transponder mode). This halves the acoustic round-trip time and allows a higher position update rate. It may also help when interleaving USBL signalling with other acoustic systems in use.
- Data transfer features, where arbitrary user-supplied data is added to the acoustic messages exchanged between the USBL head and modem. This may allow short text messages to be exchanged with a diver, or for a remote seabed data logger to be interrogated.


